
AS5030 magnetic encoder: capturing a PWM signal with an ATSAMD21
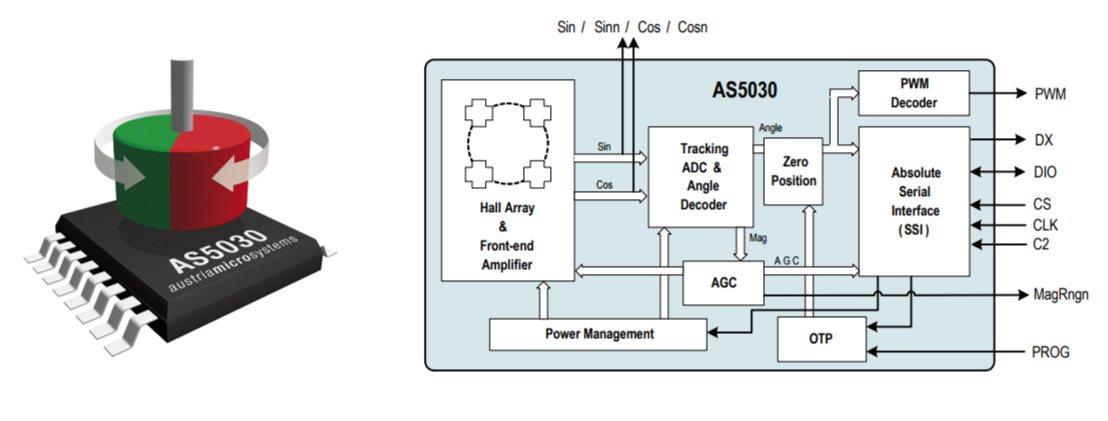
It seems that I can’t avoid periodically ostracizing this page. Welp, let’s try to make it up. Context: the AS5030 magnetic encoder IC In a project I’m currently working on (more about it in later posts, perhaps), I needed a halfway decent way of measuring the angular displacement of a small, manually-turnt wheel. I had … Read more